Категории
Категории Корзина
Корзина Информация
Информация Хиты продаж
Хиты продаж






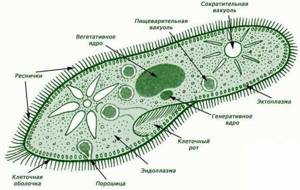
Прибор для определения координат
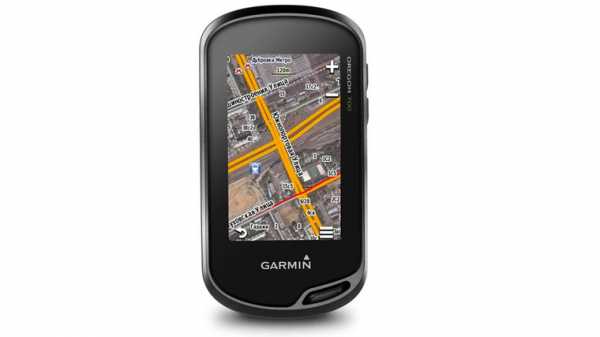
Как выбрать туристический навигатор (2019) | Навигаторы GPS | Блог
Туристические навигаторы так и не стали массовым гаджетом – высокая цена отпугивала многих покупателей еще тогда, когда альтернативы «Гарминам» просто не было. Теперь же, когда GPS-модуль есть даже в самых недорогих смартфонах, интерес к навигаторам упал до минимума. Но если автомобильные навигаторы почти вытеснены смартфонами, то туристические до сих пор пользуются спросом среди многих путешественников, туристов и спортсменов.
Производители продолжают выпускать новые модели, с полок магазинов они пропадать не торопятся. Какие же преимущества заставляют поклонников туристических навигаторов оставаться верными этим устройствам?
- Надежность. Разнообразие аппаратной начинки и программного обеспечения смартфонов в этом ракурсе скорее минус – нет никакой гарантии, что именно на вашей модели навигационное приложение не даст сбой в самый важный момент. В то же время программное и аппаратное обеспечение туристических навигаторов разработаны с учетом повышенных требований к надежности устройства.

- Продолжительность работы. Включенный GPS-модуль смартфона сильно ускоряет разряд аккумулятора, редкий смартфон сможет проработать в режиме навигации хотя бы 5-6 часов. А у навигаторов время автономной работы колеблется от 12 часов до нескольких суток.
- Защищенность от внешних воздействий. Большинство туристических навигаторов спокойно переносят низкую температуру, удары и погружения в воду. Причем уровень защиты даже самых простых навигаторов намного выше, чем у большинства «защищенных» смартфонов.
-

- Питание от стандартных элементов типа АА или ААА. Намного проще и дешевле взять с собой «про запас» несколько комплектов обычных батареек, чем несколько аккумуляторов для смартфона.
- Уверенный прием сигнала со спутников. Навигация все же не является приоритетом для смартфонов и GPS-модули в них часто устанавливаются по остаточному принципу. В итоге поиск спутников может занимать десятки минут, а отсутствие приличной GPS антенны – привести к тому, что для пропадания сигнала со спутников будет достаточно деревьев над головой или даже просто облаков. Туристический навигатор же не только имеет надежную встроенную антенну и чувствительный приемник, большинство из них оснащены разъемом для подключения внешней GPS-антенны, способной значительно улучшить прием сигнала в сложных условиях.
-

Резюмируя, можно сказать, что летом в населенной местности для рыбалки, охоты или походов «выходного дня» смартфона с навигационным приложением может быть достаточно – даже если он подведет, ничего непоправимого не произойдет. А вот для «диких» мест или холодной погоды – когда от возможности определить свое местоположение может зависеть ваша жизнь – туристический навигатор остается вне конкуренции.
Кроме того, туристические GPS-навигаторы используются в качестве средств спортивной фиксации в некоторых видах спорта: в парусных регатах, в воздухоплавании, в планерном, дельтапланерном и парапланерном спорте и т.п. И здесь их смартфоном заменить никак не получится.

Решившись обзавестись туристическим навигатором, определитесь с характером его использования – в разных условиях будут актуальны различные характеристики этого устройства.
Характеристики туристических навигаторов
Поддержка ГЛОНАСС определяет, может ли навигатор ориентироваться по сигналам со спутников российской навигационной системы ГЛОНАСС, или принимает сигнал только спутников американской NAVSTAR GPS.
Многие считают, что двухрежимные навигаторы имеют лучшую точность, однако в большинстве случаев это не так. Погрешность определения координат у ГЛОНАСС изначально чуть больше, чем у GPS, а значит в двухдиапазонном режиме ГЛОНАСС+GPS навигаторы демонстрируют ничуть не лучшую (а порой – и худшую) точность, чем в режиме чистого GPS.

С учетом того, что в двудиапазонном режиме устройство потребляет больше энергии (и, соответственно, меньше работает без подзарядки), в равнинной местности никакого преимущества двухдиапазонные навигаторы не имеют – для сохранения заряда батареи их лучше переводить в режим «только GPS».
Другое дело в горах. Для определения координат навигатор должен получить сигнал от 4х спутников. Если же часть небосклона закрыта горным склоном, то в поле зрения может просто не оказаться нужного количества спутников. И в этом случае поддержка второго диапазона увеличит шанс определения собственного местонахождения.
В туристическом навигаторе можно сохранить определенное количество маршрутов – путей, проходящих через определенные маршрутные точки (наборы координат, определяющие некоторую точку на карте). В режиме следования по маршруту, навигатор будет отображать направление к следующей маршрутной точке и отклонение от текущей линии маршрута.
Количество маршрутов, которых можно сохранить в памяти навигатора, ограничено – обычно их не более 250.

В процессе движения (через определенные промежутки времени) навигатор сохраняет текущее положение – записывает путевую точку. Промежуток времени сохранения путевых точек можно менять в широких пределах; путевую точку также можно поставить вручную. Важным моментом здесь является то, что количество путевых точек также ограничено. В разных моделях их может быть от 2000 до 10000 и на этот параметр надо обратить особое внимание.

К примеру, если ваш навигатор может сохранить до 2000 путевых точек, и вы установите промежуток сохранения путевых точек в 1 секунду, то уже через полчаса память устройства заполнится. Если же при этом выбран режим циклической записи путевых точек, а на экране выставлен крупный масштаб, то старые точки начнут затираться, а вы этого даже не заметите. Через несколько часов, при попытке вернуться назад, вы с неприятным удивлением заметите, что ваш «след» заканчивается в паре километров от вас.
Выставление большого интервала сохранения путевых точек помогает не заблудиться, но снижает точность записанного трека. Это особенно важно, если навигатор используется как средство контроля – например, спортивного. Поэтому подбирайте количество точек в соответствии с тем, как долго длится ваш обычный маршрут, какую длину он имеет, и насколько вам важна точность трека его прохождения.
Путевым компьютером оснащено большинство туристических навигаторов. Путевой компьютер отображает текущую скорость, среднюю и максимальную скорость на маршруте, пройденное расстояние и прочие статистические данные.
Если вы планируете использовать туристический навигатор и в качестве автомобильного, обратите внимание на соответствующие опции: расчет автомобильных маршрутов, голосовые сообщения и загрузку пробок. Путевой компьютер такого навигатора способен строить оптимальный маршрут по автомобильным дорогам между заданными точками. Загрузка пробок позволит использовать при построении маршрута актуальную информацию о дорожной ситуации, а голосовое сопровождение позволит двигаться по маршруту, ориентируясь по голосовым командам, предупреждающим о нужных поворотах.

«Автомобильные» функции расширяют возможности туристического навигатора, однако имейте в виду, что и цену устройства они поднимают весьма значительно. Недорогой туристический навигатор и средний автомобильный вместе обойдутся вам намного дешевле, чем один туристический с теми же функциями.
Если вам важна высокая точность определения координат, обратите внимание на поддержку WAAS и EGNOS. Это – две схожие системы, содержащие наземные станции и геостационарные (расположенные над экватором и неподвижные относительно земли) спутники, вычисляющие поправку для спутников GPS и отправляющие данные о ней наземным приемникам. Использование WAAS и EGNOS обеспечивает погрешность измерения координат не более 1 м по горизонтали и не более 1,5 м по вертикали. К сожалению, спутники этих систем расположены только над США и Европой, и в большей части территории России их сигнал недоступен.
Встроенная карта есть на всех современных навигаторах. Однако степень их детализации на разных моделях может сильно отличаться. На недорогих моделях предустановленная карта может содержать лишь точки крупных населенных пунктов и основные дороги. И хотя установка пользовательских карт также возможна на всех моделях, далеко не на всех это делается легко и быстро. Если у устройства есть слот для карт памяти, новую карту можно установить в устройство, записав её на карту памяти. Топовые модели способны получать карты через Wi-Fi или Bluetooth. На самых простых моделях возможна загрузка пользовательских карт с компьютера через разъем mini-USB. Подходящие карты можно найти в Интернете.

Если объем встроенной памяти не позволяет загрузить пользовательскую карту, вам придется искать карту меньшего размера или вручную облегчать её с помощью специализированного ПО.
Магнитный компас позволяет навигатору определять направление на стороны света в покое. При отсутствии магнитного компаса узнать где север, а где юг, можно только в движении – по взаимному расположению двух последних путевых точек.
Барометр позволяет навигатору более точно измерять высоту – эта опция будет полезна, если вы собираетесь брать устройство в горы или использовать при занятиях авиационными видами спорта.

Характеристики экрана для этого типа устройств особого значения не имеют – разумеется, цветной экран с высоким разрешением дает больше информации, а сенсорный более удобен в обращении. Однако чем лучше характеристики экрана, тем больше он потребляет энергии. И где-нибудь в «медвежьем углу» на последней паре батареек характеристики экрана будут вас заботить меньше всего.
Варианты выбора туристических навигаторов
Если вам нужно надежное и защищенное устройство, способное указать вам верную дорогу в любых природных условиях за минимальные деньги, выбирайте среди недорогих туристических навигаторов.

[url="https://www.dns-shop.ru/catalog/17a8eda816404e77/turisticheskie-navigatory/?order=1&groupBy=none&stock=2&f=fgs]Туристический навигатор с поддержкой ГЛОНАСС имеет больше шансов «поймать» нужное для определения координат количество спутников.
[url="https://www.dns-shop.ru/catalog/17a8eda816404e77/turisticheskie-navigatory/?order=1&groupBy=none&stock=2&f=fq6]Наличие слота для карт памяти облегчит установку в устройство актуальных карт.

Поддержка навигатором [url="https://www.dns-shop.ru/catalog/17a8eda816404e77/turisticheskie-navigatory/?order=1&groupBy=none&stock=2&f=3apl]Bluetooth или [url="https://www.dns-shop.ru/catalog/17a8eda816404e77/turisticheskie-navigatory/?order=1&groupBy=none&stock=2&f=3apf]Wi-Fi также способны облегчить обновление карт.
Если вы хотите, чтобы туристический навигатор мог работать и в машине, прокладывая нужный маршрут по автомобильным дорогам с учетом текущей дорожной обстановки, выбирайте среди [url="https://www.dns-shop.ru/catalog/17a8eda816404e77/turisticheskie-navigatory/?f=fi3]моделей с загрузкой пробок.
Геодезический GPS приемник в Москве
1
Цену уточняйте
Ремонт GPS приемника Spectra Precision
Доставка из г. Москва
91% из 70Приборы для проведения геодезических работ
Геодезия как наука сегодня активно развивается в соответствии с требованиями современного строительства, сельского хозяйства, промышленности, когда критически важным стало обеспечить достаточную точность при проведении измерений, иметь возможность работать автономно в любых климатических условиях. Именно для такой работы и предназначены приборы, которые используются для проведения геодезических изысканий. С их помощью выполняется достаточно широкий спектр строительных, ремонтных, планировочных задач от проведения измерений до выноса в натуру отдельных точек по расстоянию и углу.
Основные группы приборов для геодезических работ
Все приборы, которые используются в данной отрасли можно условно разделить на несколько групп в зависимости от принципа их работы.
- GPS-техника позволит точно, быстро и достаточно легко определить координаты заданной точки на местности, измерить расстояние, разбить участки. Оборудование этой категории, как правило, многофункционально, поэтому способно заменить сразу несколько разнообразных устройств для проведения измерений более традиционным способом.
- Оптические приборы для определения расстояний, горизонтальных и вертикальных углов, превышений вертикальных точек. Их важным преимуществом является то, что они работают с высокой точностью вне зависимости от погодных условий на больших дистанциях. Отдельные устройства этой категории предназначены для наружных и внутренних работ. Самыми распространёнными примерами таких приборов являются
- нивелиры,
- теодолиты,
- тахеометры,
- лазерные уровни и рулетки.
Без использования геодезического оборудования не обходится и в современном ландшафтном дизайне, при проектировании ремонтных работ, отделки. К примеру, лазерные приборы в современной конфигурации обеспечивают достаточно широкую функциональность и наглядность полученного результата. Они позволяют с высокой точностью выполнять необходимые замеры одному человеку, что всегда повышает эффективность использования рабочего времени и увеличивает производительность труда.
Основные виды геодезических устройств
GPS-техника
При формировании информации для построения карт в малоизученных или труднодоступных районах высокая точность и качество выполняемых работ обеспечивается с использованием специализированного GPS-оборудования. с его помощью у пользователя появляется возможность получать необходимые координаты с точностью до 1 мм в любых погодных или климатических условиях, при любой видимости. Кроме того, такие устройства управляются при помощи одной-двух кнопок, поэтому обучение оператора занимает минимум времени, не требуя специальной подготовки.
Важно и то, что обработка результатов проведенных измерений с помощью профильного программного обеспечения также фактически выполняется в автоматическом режиме. С использованием технологий GPS у предприятий, предоставляющих геодезические услуги, появляется возможность несколько сократить число специалистов, выезжающих на объект, тем самым снижая себестоимость предоставляемых услуг.
Электронный тахеометр
Этот прибор идеально подходит для ведения работ в полевых условиях и кодирования полученной информации. Тахеометры используются при проведении съёмок местности после получения о ней всех базовых координат, изменений для каждой из точек геодезической сети. Тахеометры позволяют не только измерять расстояния и углы, но и кодировать данные, выполняя своего рода «оцифровку» полученных сведений непосредственно в поле.
Технология выполнения работ с использованием этого прибора достаточно проста и автоматизирована: в специальную таблицу вносятся все объекты, которые подлежат исследованию, присваивая им индивидуальный идентификатор. Программное обеспечение позволяет загрузить эти сведения в прибор, чтобы при выполнении работ оператор получил возможность просто выбирать на экране тахеометра необходимый объект и измерять его координаты. В камеральных условиях данные выгружаются в компьютер, а геодезист получает всю информацию с привязкой к конкретному объекту. Это значительно облегчает работу и снижает до минимума вероятность ошибки.
Тахеометры также активно используются при проведении:
- инженерных измерений,
- туннельных работ,
- измерений фасадов зданий,
- мониторинга деформаций,
- при проведении расчётов объёма земляных работ,
- в процессе монтажа конструкций,
- работ в труднодоступных местах.
Лазерные дальномеры
Это компактные портативные приборы, получившие широкое применение в работе архитекторов, строителей, дизайнеров, домашних мастеров. Лазерные дальномеры очень популярны и востребованы благодаря своей функциональности, удобству эксплуатации, невысокой стоимости. Принцип работы такого инструмента заключается в измерении времени, за которое лазерный луч проходит расстояние от излучателя до заданного объекта и обратно. Погрешность полученного результата ограничивается миллиметрами, а скорость выполнения замеров, их точность и возможность выполнения одним человеком без помощника стали определяющими при выборе оптимального оборудования для проведения подобных работ.
Лазерные нивелиры
Эти приборы, по сути, являются построителями плоскостей при помощи лазерных лучей. В результате их использования специалисту удаётся быстро и наглядно получить видимые линии, которые проецируются на заданную поверхность. Все полученные плоскости всегда идеально выровнены по вертикали и горизонтали, что позволяет оперативно оценить качество выполненных строительных работ при наружной и внутренней отделке помещений. Обработка полученных данных выполняется при помощи специализированного программного обеспечения.
Теодолиты и оптические нивелиры
Это профессиональное геодезическое оборудование, которое позволяет с высокой точностью определить расстояния, превышения точек по вертикали, горизонтальные и вертикальные углы. Теодолиты и оптические нивелиры – неэлектронные устройства, которые могут использоваться специалистами вне зависимости от погодных условий. Они особенно активно используются при устройстве фундаментов и возведении, в ходе строительства эстакад и мостов.
Сотрудники компании «ГеоСодружество» оснащены всем необходимым для проведения полного комплекса работ на объектах любого назначения, чтобы гарантировать неизменно высокую точность и качество выполняемых работ.
GPS с точностью до сантиметра / Блог компании Intel / Хабр
Современные технологии спутниковой навигации обеспечивают определение местоположения с точностью порядка 10-15 метров. В большинстве случаев этого достаточно, однако, в некоторых случаях требуется большее: скажем, автономный дрон, достаточно быстро перемещающийся над земной поверхностью, будет чувствовать себя неуютно в облаке из координат с метровыми погрешностями.
Для уточнения спутниковых данных используются дифференциальные системы и RTK (real-time kinematics) технологии, но до последнего времени подобного рода устройства были дорогими и громоздкими. Последние достижения цифровой техники в лице микрокомпьютера Intel Edison помогли решить эту проблему. Итак, встречайте: Reach – первый компактный высокоточный приемник GPS, очень доступный по цене, и, к тому же, разработанный в России.
Для начала поговорим немного о дифференциальных технологиях, которые позволяют Reach добиться столь высоких результатов. Они хорошо известны и достаточно широко внедрены. Дифференциальные навигационные системы (ДНСС) улучшают точность определения местоположения и скорости подвижных пользователей за счет предоставления данных измерений или корректирующей информации от одной или нескольких базовых станций.
Координаты каждой базовой станции известны с высокой точностью, так что данные измерений станцией служат для калибровки данных расположенных рядом приемников. Приемник может вычислить теоретическое расстояние и время распространения сигнала между собой и каждым спутником. Когда эти теоретические значения сравниваются с данными наблюдений, то различия представляют собой ошибки в принимаемых сигналах. Корректирующая информация (данные RTCM) получается из этих различий.
Точность определения координат с помощью Reach. Обратите внимание на масштаб.
Корректирующая информация может получаться устройством Reach из двух источников. Во-первых от общедоступной сети базовых станций через интернет по протоколу NTRIP (Networked Transport of RTCM via Internet Protocol), реализующего идею, описанную выше, применительно к глобальной компьютерной сети. Во-вторых, с помощью второго Reach, занимающего стационарную позицию вблизи первого и являющегося, таким образом, базовой станцией в терминах ДНСС. Второй вариант предпочтительнее (точность ДНСС сильно падает с увеличением расстояния между приемником и БС) – не случайно в рамках краудфайндинговой кампании на сайте Indiegogo создатели Reach первой позицией предлагают выкупить именно набор из двух устройств.
Спецификации устройства приведены в таблице ниже. Как видим, аппаратно он состоит из 3 частей: компьютера Intel Edison, на котором запущена ОС Linux и RTK софт RTKLIB; GPS-приемника U-blox NEO-M8T и антенны Tallysman TW4721. Обратите внимание, что приемник поддерживает все существующие спутниковые системы: GPS, ГЛОНАСС, Beidou и QZSS. Вся эта совокупность программных и аппаратных компонент обеспечивает впечатляющую точность определения координат: до 2 см!
| Спутниковый приемник | U-blox NEO-M8T — 72 channels, output rate up to 18Hz, supports GPS/QZSS L1 C/A, GLONASS L10F, BeiDou B1, SBAS L1 C/A: WAAS, EGNOS, MSAS, Galileo-ready E1B/C |
| Компьютерная платформа | Intel Edison — dual-core 500MHz |
| Интерфейсы | I2C, UART, GPIO, TimeStamp, OTG USB, Bluetooth, Wi-Fi, GNSS |
| Антенна | Tallysman TW4721 Dual Feed GPS/BeiDou/Galileo/GLONASS |
| Размеры | 26х36 мм |
| Вес | 13 г |
Создатели Reach, компания Emlid, удачно выступили на сайте indiegogo: меньше чем за месяц собрана почти двойная запрошенная сумма. Значит, проект непременно будет реализован. У вас еще есть время, чтобы сделать предзаказ и оказаться в числе первых, кто получит принципиально новое навигационное устройство. Рассылка товара запланирована на июль.
Gps приёмник геодезический
GPS приёмник геодезический
25-09-2018

Стремительное развитие технологий позволило существенно расширить линейку геодезических приборов, которые используют специалисты в ходе изысканий. Таким оборудованием стал GPS приёмник геодезический, который позволяет получить максимально точные данные, практически без погрешностей. Кроме того, оборудование позволяет ускорить проведение изысканий, что позволяет завершить работы в сжатые сроки.
Функциональные особенности GPS приёмников
GPS или Global Positioning System, является ничем иным, как глобальной системой позиционирования, которая изначально была создана для повышения эффективности ведения военных действий. Однако с течением времени потенциал данной системы существенно расширился, и она стала служить для вполне мирных целей. Доказательством тому стали геодезические приёмники с поддержкой GPS и ГЛОНАСС.
Система глобального позиционирования сформирована 24 спутниками, выведенных на земную орбиту. Именно они и обеспечивают поддержку работоспособности всей навигационной системы. Спутниковые передатчики, мощность которых составляет 50 Вт, передают данные приемникам с Земли. Обеспечение бесперебойной координации группе спутников гарантируют атомные часы, считающиеся самыми точными. Частота работы передатчиков составляет 1575,42 МГц, а также 1227,6 МГц. Система комплектуется спутниковыми приемниками, количество которых не ограничено. Для высокоточного оборудования, такого как GPS приёмник геодезический, используются сложные элементы, которые принимают сигналы от специальных передатчиков и фиксируют их.
Геодезисты, вооружившись GPS оборудованием, получают данные, отосланные сразу всей группой орбитальных спутников. Информация сопровождается датой и временем, указанным с максимальной точностью. Такие данные отправляются каждым вращающимся на орбите спутником, а задача GPS оборудования просчитать фактическое расстояние до объекта. Информативными считаются данные, полученные минимум с 4 спутников, которые дадут четкое представление о координатах наземных объектов. Суть работы, в которой заключен GPS приёмник геодезический, – это разработка, а также реконструкция всевозможных съемочных, а также опорных сетей. Кроме того, система применяется при производстве кадастровых работ, например, выносе в натуру границ наделов, межевании. Актуальным является применение спутникового оборудования и при измерениях, которые относятся к государственной геодезической сети (ГГС).
Застройщики, планирующие работы, должны прежде всего ориентироваться именно на ГГС. Инвестиции в строительство нового объекта будут вполне оправданы, если стройка располагается на удалении от ГГС не более чем 5 – 15 километров от производственных, а также промышленных объектов, которые могут представлять опасность для людей. Таким образом, исследования помогут исключить возможность техногенных катастроф, грозящих непредсказуемыми последствиями.
Отличия GPS приёмников от другого геодезического оборудования
На данный момент GPS приёмник геодезический считается наиболее совершенным оборудованием для проведения изысканий, хотя и не самым распространенным, за счет стоимости услуг, которые в большей части формируются ценой приборов и операционной части. Дело в том, что эталонную частоту необходимо приобретать, в противном случае поставщиком услуг будет предоставлена случайная частота, изобилующая ошибками и минимальной точностью. Данные условия предопределяют достаточно высокую стоимость геодезических услуг.
Однако заказчикам не стоит забывать, что применение приемника геодезического, гарантирует абсолютную точность измерений объектов, а значит и их безопасность, а также абсолютное соответствие установленным нормативам. Как результат, заказчики получают максимально точные схемы участков, без личного присутствия специалистов, так как все работы, связанные с мониторингом, будут проведены дистанционно.
Как выполняются измерения?
Специалисты выезжают на объект, предварительно установив на одном из ближайших пунктах ГГС базовый GPS приёмник. Другой GPS приёмник (ровер) будет перемещаться по объекту, согласно выбранной траектории. Зависимо от того, как передвигается GPS приёмник геодезический (ровер), различают несколько методов измерения:
- Статический, считается наиболее точным способом, погрешность которого не превышает 5 миллиметров. Измерения производятся на протяжении часа, или чуть дольше. Этот метод измерений применяется, если необходимо создать или развивать опорные геодезические сети.
- Быстростатический, не самый достоверный способ измерений. На основании этого метода создается схема сгущения сетей. Для выполнения измерений достаточно 15 или 20 минут, чтобы получить необходимые данные.
- Кинематический, очень быстрый способ измерений, который чаще всего используется в топографической съёмке, на масштабных объектах. Погрешность измерений составляет не более 2 сантиметров.
- Непрерывный кинематический способ, с погрешностью не более 15 сантиметров применяется для исследования подземных коммуникаций, дорог, линий электропередач, и т.д.
- RTK способ – является новинкой, и может быть использован в местах, с развитой сетью вышек мобильной связи. Для проведения измерений достаточно нескольких секунд, что существенно экономит время. Однако, этот способ не относится к наиболее точным методам геодезических измерений.
В целом, точность измерений зависит от времени, выделенного на изыскания. Чем дольше приёмник будет находиться на объекте, тем точнее будут полученные данные.
Преимущества GPS приёмников
Применение приёмника геодезического упрощает проведение изысканий, так как исключается необходимость в прямой видимости на пункты ГГС, соответственно исключается потребность в проведении работ для создания полигонометрических и тахеометрических ходов. По большому счету, приёмником может выступать даже смартфон, с соответствующим ПО, но, естественно, геодезические компании пользуются высокочастотными, специализированными приёмниками. Среди преимуществ GPS приёмников стоит выделить:
- Оперативность.
- Мобильность.
- Возможность проведения измерений в сложных условиях.
- Исключается необходимость в прямой видимости на пункты государственной геодезической сети.
Полученные в ходе изысканий данные обрабатываются специалистами и на их основе составляются схемы.
Система GPS. Взгляд изнутри и снаружи
Немного истории.
Как нередко бывает с высокотехнологичными проектами, инициаторами разработки и реализации системы GPS (Global Positioning System - система глобального позиционирования) стали военные. Проект спутниковой сети для определения координат в режиме реального времени в любой точке земного шара был назван Navstar (Navigation system with timing and ranging - навигационная система определения времени и дальности), тогда как аббревиатура GPS появилась позднее, когда система стала использоваться не только в оборонных, но и в гражданских целях.
Первые шаги по развертыванию навигационной сети были предприняты в середине семидесятых, коммерческая же эксплуатация системы в сегодняшнем виде началась с 1995 года. В настоящий момент в работе находятся 28 спутников, равномерно распределенных по орбитам с высотой 20350 км (для полнофункциональной работы достаточно 24 спутников).
Несколько забегая вперед, скажу, что поистине ключевым моментом в истории GPS стало решение президента США об отмене с 1 мая 2000 года режима так называемого селективного доступа (SA - selective availability) - погрешности, искусственно вносимой в спутниковые сигналы для неточной работы гражданских GPS-приемников. С этого момента любительский терминал может определять координаты с точностью в несколько метров (ранее погрешность составляла десятки метров)! На рис.1 представлены ошибки в навигации до и после отключения режима селективного доступа (данные U.S. Space Command ).Рис1.
Попробуем разобраться в общих чертах, как устроена система глобального позиционирования, а потом коснемся ряда пользовательских аспектов. Рассмотрение же начнем с принципа определения дальности, лежащего в основе работы космической навигационной системы.
Алгоритм измерения расстояния от точки наблюдения до спутника.
Дальнометрия основана на вычислении расстояния по временной задержке распространения радиосигнала от спутника к приемнику. Если знать время распространения радиосигнала, то пройденный им путь легко вычислить, просто умножив время на скорость света.
Каждый спутник системы GPS непрерывно генерирует радиоволны двух частот - L1=1575.42МГц и L2=1227.60МГц. Мощность передатчика составляет 50 и 8 Ватт соответственно. Навигационный сигнал представляет собой фазовоманипулированный псевдослучайный код PRN (Pseudo Random Number code). PRN бывает двух типов: первый, C/A-код (Coarse Acquisition code - грубый код) используется в гражданских приемниках, второй Р-код (Precision code - точный код), используется в военных целях, а также, иногда, для решения задач геодезии и картографии. Частота L1 модулируется как С/А, так и Р-кодом, частота L2 существует только для передачи Р-кода. Кроме описанных, существует еще и Y-код, представляющий собой зашифрованный Р-код (в военное время система шифровки может меняться).
Период повторения кода довольно велик (например, для P-кода он равен 267 дням). Каждый GPS-приемник имеет собственный генератор, работающий на той же частоте и модулирующий сигнал по тому же закону, что и генератор спутника. Таким образом, по времени задержки между одинаковыми участками кода, принятого со спутника и сгенерированного самостоятельно, можно вычислить время распространения сигнала, а, следовательно, и расстояние до спутника.
Одной из основных технических сложностей описанного выше метода является синхронизация часов на спутнике и в приемнике. Даже мизерная по обычным меркам погрешность может привести к огромной ошибке в определении расстояния. Каждый спутник несет на борту высокоточные атомные часы. Понятно, что устанавливать подобную штуку в каждый приемник невозможно. Поэтому для коррекции ошибок в определении координат из-за погрешностей встроенных в приемник часов используется некоторая избыточность в данных, необходимых для однозначной привязки к местности (подробней об этом чуть позже).
Кроме самих навигационных сигналов, спутник непрерывно передает разного рода служебную информацию. Приемник получает, например, эфемериды (точные данные об орбите спутника), прогноз задержки распространения радиосигнала в ионосфере (так как скорость света меняется при прохождении разных слоев атмосферы), а также сведения о работоспособности спутника (так называемых "альманах", содержащий обновляемые каждые 12.5 минут сведения о состоянии и орбитах всех спутников). Эти данные передаются со скоростью 50 бит/с на частотах L1 или L2.
Общие принципы определения координат с помощью GPS.
Основой идеи определения координат GPS-приемника является вычисление расстояния от него до нескольких спутников, расположение которых считается известным (эти данные содержатся в принятом со спутника альманахе). В геодезии метод вычисления положения объекта по измерению его удаленности от точек с заданными координатами называется трилатерацией. Рис2.
Если известно расстояние А до одного спутника, то координаты приемника определить нельзя (он может находится в любой точке сферы радиусом А, описанной вокруг спутника). Пусть известна удаленность В приемника от второго спутника. В этом случае определение координат также не представляется возможным - объект находится где-то на окружности (она показана синим цветом на рис.2), которая является пересечением двух сфер. Расстояние С до третьего спутника сокращает неопределенность в координатах до двух точек (обозначены двумя жирными синими точками на рис.2). Этого уже достаточно для однозначного определения координат - дело в том, что из двух возможных точек расположения приемника лишь одна находится на поверхности Земли (или в непосредственной близи от нее), а вторая, ложная, оказывается либо глубоко внутри Земли, либо очень высоко над ее поверхностью. Таким образом, теоретически для трехмерной навигации достаточно знать расстояния от приемника до трех спутников.
Однако в жизни все не так просто. Приведенные выше рассуждения были сделаны для случая, когда расстояния от точки наблюдения до спутников известны с абсолютной точностью. Разумеется, как бы ни изощрялись инженеры, некоторая погрешность всегда имеет место (хотя бы по указанной в предыдущем разделе неточной синхронизации часов приемника и спутника, зависимости скорости света от состояния атмосферы и т.п.). Поэтому для определения трехмерных координат приемника привлекаются не три, а минимум четыре спутника.
Получив сигнал от четырех (или больше) спутников, приемник ищет точку пересечения соответствующих сфер. Если такой точки нет, процессор приемника начинает методом последовательных приближений корректировать свои часы до тех пор, пока не добьется пересечения всех сфер в одной точке.
Следует отметить, что точность определения координат связана не только с прецизионным расчетом расстояния от приемника до спутников, но и с величиной погрешности задания местоположения самих спутников. Для контроля орбит и координат спутников существуют четыре наземных станции слежения, системы связи и центр управления, подконтрольные Министерству Обороны США. Станции слежения постоянно ведут наблюдения за всеми спутниками системы и передают данные об их орбитах в центр управления, где вычисляются уточнённые элементы траекторий и поправки спутниковых часов. Указанные параметры вносятся в альманах и передаются на спутники, а те, в свою очередь, отсылают эту информацию всем работающим приемникам.
Кроме перечисленных, существует еще масса специальных систем, увеличивающих точность навигации, - например, особые схемы обработки сигнала снижают ошибки от интерференции (взаимодействия прямого спутникового сигнала с отраженным, например, от зданий). Мы не будем углубляться в особенности функционирования этих устройств, чтобы излишне не осложнять текст.
После отмены описанного выше режима селективного доступа гражданские приемники "привязываются к местности" с погрешностью 3-5 метров (высота определяется с точностью около 10 метров). Приведенные цифры соответствуют одновременному приему сигнала с 6-8 спутников (большинство современных аппаратов имеют 12-канальный приемник, позволяющий одновременно обрабатывать информацию от 12 спутников).
Качественно уменьшить ошибку (до нескольких сантиметров) в измерении координат позволяет режим так называемой дифференциальной коррекции (DGPS - Differential GPS). Дифференциальный режим состоит в использовании двух приемников - один неподвижно находится в точке с известными координатами и называется "базовым", а второй, как и раньше, является мобильным. Данные, полученные базовым приемником, используются для коррекции информации, собранной передвижным аппаратом. Коррекция может осуществляться как в режиме реального времени, так и при "оффлайновой" обработке данных, например, на компьютере.
Обычно в качестве базового используется профессиональный приемник, принадлежащий какой-либо компании, специализирующейся на оказании услуг навигации или занимающейся геодезией. Например, в феврале 1998 года недалеко от Санкт-Петербурга компания "НавГеоКом" установила первую в России наземную станцию дифференциального GPS. Мощность передатчика станции - 100 Ватт (частота 298,5 кГц), что позволяет пользоваться DGPS при удалении от станции на расстояния до 300 км по морю и до 150 км по суше. Кроме наземных базовых приемников, для дифференциальной коррекции GPS-данных можно использовать спутниковую систему дифференциального сервиса компании OmniStar. Данные для коррекции передаются с нескольких геостационарных спутников компании.
Следует заметить, что основными заказчиками дифференциальной коррекции являются геодезические и топографические службы - для частного пользователя DGPS не представляет интереса из-за высокой стоимости (пакет услуг OmniStar на территории Европы стоит более 1500 долларов в год) и громоздкости оборудования. Да и вряд ли в повседневной жизни возникают ситуации, когда надо знать свои абсолютные географические координаты с погрешностью 10-30 см.
В заключение части, повествующей о "теоретических" аспектах функционирования GPS, скажу, что Россия и в случае с космической навигацией пошла своим путем и развивает собственную систему ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система). Но из-за отсутствия должных инвестиций в настоящее время на орбите находятся лишь семь спутников из двадцати четырех, необходимых для нормального функционирования системы…
Краткие субъективные заметки пользователя GPS.
Так уж получилось, что о возможности определять свое местоположение с помощью носимого приборчика размерами с сотовый телефон я узнал году в девяносто седьмом из какого-то журнала. Однако замечательные перспективы, нарисованные авторами статьи, были безжалостно разбиты заявленной в тексте ценой навигационного аппарата - почти 400 долларов!
Года через полтора (в августе 1998) судьба занесла меня в маленький спортивный магазинчик в американском городе Бостон. Какого же было мое удивление и радость, когда на одной из витрин я случайно заметил несколько разных навигаторов, самый дорогой из которых стоил 250 долларов (простенькие же модели предлагались за $99). Конечно, уйти из магазина без прибора я уже не мог, поэтому принялся пытать продавцов о характеристиках, преимуществах и недостатках каждой модели. Ничего вразумительного от них я не услышал (и отнюдь не из-за того, что плохо знаю английский), так что пришлось разбираться во всем самому. И в результате, как это нередко бывает, была приобретена самая продвинутая и дорогая модель - Garmin GPS II+, а также специальный чехол к ней и шнур для питания от гнезда прикуривателя автомобиля. В магазине имелось еще два аксессуара для теперь уже моего аппарата - устройство для крепления навигатора на велосипедном руле и шнур для соединения с РС. Последний я долго крутил в руках, но, в конце концов, все же решил не покупать из-за немалой цены (немногим более 30 долларов). Как потом оказалось, шнур я не купил совершенно правильно, ибо все взаимодействие прибора с компьютером сводится к "сливке" в ЭВМ пройденного маршрута (а также, думаю, координат в режиме реального времени, но насчет этого есть определенные сомнения), да и то при условии покупки софта от Garmin. Возможность загружать в прибор карты, к сожалению, отсутствует.
Давать подробное описание своего прибора я не буду хотя бы потому, что он уже снят с производства (желающие ознакомиться с подробной технической характеристикой могут сделать это здесь ). Замечу лишь, что вес навигатора - 255 гр., размеры - 59х127х41 мм. Благодаря своему треугольному сечению аппарат исключительно устойчиво располагается на столе или панели приборов автомобиля (для более прочной фиксации в комплект входит липучка Velcro). Питание осуществляется от четырех пальчиковых батареек АА (их хватает лишь на 24 часа непрерывной работы) или внешнего источника. Попробую рассказать об основных возможностях моего прибора, которые, думаю, имеет подавляющее большинство присутствующих на рынке навигаторов.
С первого взгляда GPS II+ можно принять за мобильный телефон, выпущенный пару лет назад. Лишь только присмотревшись, замечаешь необычно толстую антенну, огромный дисплей (56х38 мм!) и малое, по телефонным меркам, количество клавиш.
При включении прибора начинается процесс сбора информации со спутников, а на экране появляется простенькая мультипликация (вращающийся земной шар). После первоначальной инициализации (которая в открытом месте занимает пару минут) на дисплее возникает примитивная карта неба с номерами видимых спутников, а рядом - гистограмма, свидетельствующая об уровне сигнала от каждого спутника. Кроме того, указывается погрешность навигации (в метрах) - чем больше спутников видит прибор, тем, разумеется, точнее будет определение координат.
Интерфейс GPS II+ построен по принципу "перелистываемых" страниц (для этого даже есть специальная кнопка PAGE). Выше была описана "страница спутников", а кроме нее, есть "страница навигации", "карта", "страница возврата", "страница меню" и ряд других. Следует заметить, что описываемый аппарат не русифицирован, однако даже с плохим знанием английского можно понять его работу.
На странице навигации отображаются: абсолютные географические координаты, пройденный путь, мгновенная и средняя скорости движения, высота над уровнем моря, время движения и, в верхней части экрана, электронный компас. Надо сказать, что высота определяется с гораздо большей погрешностью, чем две горизонтальные координаты (на этот счет есть даже специальная ремарка в руководстве пользователя), что не позволяет использовать GPS, например, для определения высоты парапланеристами. Зато мгновенная скорость вычисляется исключительно точно (особенно для быстродвижущихся объектов), что дает возможность использовать прибор для определения скорости снегоходов (спидометры которых имеют обыкновение значительно врать). Могу дать "вредный совет" - взяв напрокат автомобиль, отключите его спидометр (чтобы он насчитал поменьше километров - ведь оплата зачастую пропорциональна пробегу), а скорость и пройденное расстояние определяйте по GPS (благо он может вести измерения как в милях, так и в километрах).
Средняя скорость движения определяется по несколько странному алгоритму - время простоя (когда мгновенная скорость равна нулю) в вычислениях не учитывается (более логично, на мой взгляд, было бы просто делить пройденное расстояние на общее время поездки, но создатели GPS II+ руководствовались каким-то иными соображениями).
Пройденный путь отображается на "карте" (памяти аппарата хватает километров на 800 - при большем пробеге автоматически стираются самые старые метки), так что при желании можно посмотреть схему своих блужданий. Масштаб карты меняется от десятков метров до сотен километров, что, несомненно, исключительно удобно. Самое же замечательное состоит в том, что в памяти прибора имеются координаты основных населенных пункты всего мира! США, конечно, представлено более подробно (например, все районы Бостона присутствуют на карте с названиями), чем Россия (тут указано расположение лишь таких городов как Москва, Тверь, Подольск и т.п.). Представьте, например, что Вы направляетесь из Москвы в Брест. Находите в памяти навигатора "Брест", жмете специальную кнопку "GO TO", и на экране появляется локальное направление Вашего движения; глобальное направление на Брест; количество километров (по прямой, разумеется), оставшееся до точки назначения; средняя скорость и расчетное время прибытия. И так в любой точке мира - хоть в Чехии, хоть в Австралии, хоть в Таиланде…
Не менее полезной является так называемая функция возврата. Память аппарата позволяет записывать до 500 ключевых точек (waypoints). Каждую точку пользователь может называть по своему усмотрению (например, DOM, DACHA и т.п.), также предусмотрены различные пиктрограммки для отображения информации на дисплее. Включив функцию возврата к точке (любой из заранее записанных), владелец навигатора получает те же возможности, что и в описанном выше случае с Брестом (т.е. расстояние до точки, расчетное время прибытия и все остальное). У меня, например, был такой случай. Приехав в Прагу на автомобиле и устроившись в гостинице, мы с приятелем отправились в центр города. Оставив машину на стоянке, пошли побродить. После бесцельной трехчасовой прогулки и ужина в ресторане мы поняли, что совершенно не помним, где оставили машину. На улице ночь, мы - на одной из маленьких улочек незнакомого города… К счастью, прежде чем покинуть автомобиль, я записал его местоположение в навигатор. Теперь же, нажав пару кнопок на аппарате, я узнал, что машина стоит в 500 метрах от нас и через 15 минут мы уже слушали тихую музыку, направляясь на автомобиле в гостиницу.
Кроме движения к записанной метке по прямой, что не всегда удобно в условиях города, Garmin предлагает функцию TrackBack - возврат по своему пути. Грубо говоря, кривая движения аппроксимируется рядом прямолинейных участков, а в точках излома ставятся метки. На каждом прямолинейном участке навигатор ведет пользователя к ближайшей метке, по достижении же ее осуществляется автоматическое переключение на следующую метку. Исключительно удобная функция при езде на автомобиле по незнакомой местности (сигнал со спутников сквозь здания, конечно, не проходит, поэтому, чтобы получить данные о своих координатах в условиях плотной застройки, приходится искать более-менее открытое место).
Я не буду дальше углубляться в описание возможностей прибора - поверьте, что кроме описанных, в нем есть еще масса приятных и нужных примочек. Одна смена ориентации дисплея чего стоит - можно использовать аппарат как в горизонтальном (автомобильном), так и в вертикальном (пешеходном) положении (см. рис.3).
Одной из основных же прелестей GPS для пользователя я считаю отсутствие какой-либо платы за пользование системой. Купил один раз прибор - и наслаждайся!
Заключение.
Я думаю, нет нужды перечислять области применения рассмотренной системы глобального позиционирования. GPS-приемники встраивают в автомобили, сотовые телефоны и даже наручные часы! Недавно я встретил сообщение о разработке чипа, совмещающего в себе миниатюрный GPS-приемник и модуль GSM - устройствами на его базе предлагается оснащать собачьи ошейники, чтобы хозяин мог без труда обнаружить потерявшегося пса посредством сотовой сети.
Но в любой бочке меда есть ложка дегтя. В данном случае в роли последнего выступают российские законы. Я не буду подробно рассуждать о юридических аспектах использования GPS-навигаторов в России (кое-что об этом можно найти здесь ), замечу лишь, что теоретически высокоточные навигационные приборы (коими, без сомнения являются даже любительские GPS-приемники) у нас запрещены, а их владельцев ждет конфискация аппарата и немалый штраф.
К счастью для пользователей, в России строгость законов компенсируется необязательностью их выполнения - например, по Москве разъезжает огромное количество лимузинов с шайбой-антенной GPS-приемников на крышке багажника. Все более-менее серьезные морские суда оборудованы GPS (и уже выросло целое поколение яхтсменов, с трудом ориентирующихся в пространстве по компасу и прочим традиционным средствам навигации). Надеюсь, власти не будут вставлять палки в колеса техническому прогрессу и в ближайшее время легализуют пользование GPS-приемниками в нашей стране (отменили же разрешения на сотовые телефоны), а также дадут добро на рассекречивание и тиражирование подробных карт местности, необходимых для полноценного использования автомобильных навигационных систем.
Измерение координат с помощью бистатического радара
Определение координат с помощью бистатического радара
Рисунок 1: Определение координат с помощью бистатического радара
Рисунок 1: Определение координат с помощью бистатического радара
Передаваемый импульс достигает приемника двумя способами: по прямому маршруту и после отражения от цели. Приемный радар измеряет общее расстояние r Σ = r 1 + r 2 , а азимутальный угол β и угол места ε отраженного сигнала.
Для расчета расстояния радар должен знать время, в которое передающий радар излучает активный сигнал. Эту привязку по времени можно рассчитать, поскольку передаваемый сигнал также принимается по прямому пути, известно расстояние r Ba между этими двумя радарами.
Расстояние r Σ определяет положение цели на поверхности сфероида, фокусами которых являются передающая и приемная антенны. Цель находится на пересечении поверхности этого сфероида. с прямой линией, которая характеризует направление прихода отраженного сигнала.Расстояние до цели приемной антенны r 2 можно определить с помощью закона косинуса и измеренного полного расстояния r Σ :
| r 1 2 = r 2 2 + r Ba 2 - 2r 2 · r Ba · cos γ | |
| r 1 + r 2 = r Σ | (1) |
Эта система уравнений с двумя неизвестными величинами r 1 и r 2 можно преобразовать в следующее уравнение:
| r 2 = | r Σ 2 - r Ba 2 | (2) |
| 2r Σ (1 - cos γ) |
Величина угла γ определяется по измеренному углы β и ε на основе тригонометрической связи между этими тремя углами:
| γ = arcos (cos β · cos ε) | (3) |
.
2 (б). Местоположение, расстояние и направление на картах
Расположение на картах
Большинство карт позволяют нам указать расположение точек на поверхности Земли с использованием системы координат. Для двумерной карты это система координат может использовать простые геометрические отношения между перпендикулярными осями на сетке для определения пространственное расположение. На рис. 2b-1 показано, как местоположение точки можно определить в системе координат.
| Рисунок 2b-1: A система координат сетки определяет расположение точек с пройденного расстояния по двум перпендикулярным осям от некоторого заявленного происхождения. В приведенном выше примере два оси помечены X и Y.Источник находится в нижний левый угол. Единичное расстояние, пройденное по каждая ось из исходной точки является показано. В этой системе координат значение, связанное с с осью X задается первой, за ней следует значение назначается по оси Y. Местоположение представлено звезда имеет координаты 7 (ось X), 4 (ось Y). |
В настоящее время используются два типа систем координат. общее использование в географии: географических система координат и прямоугольная (также называется декартово ) координата система .
Географические Координаты Системные
географический система координат измеряет местоположение только с два значения, несмотря на то, что локации описаны для трехмерной поверхности. Два используемых значения для определения местоположения оба измеряются относительно полярной оси . ось Земли.Две меры, используемые в Географические системы координат называются широты и долготы .
| Рисунок 2b-2: строк широты или параллелей составляют нарисовано параллельно экватору (показано красным цветом ) как круги, охватывающие поверхность Земли.Эти параллели измеряются в градусах (°). Есть 90 угловых градусов широты от экватора до каждого из полюсов. Экватору присвоено значение 0 °. Измерения широты также определяются как север или к югу от экватора, чтобы различить полушарие их место расположения. Линии долготы или меридианов являются дуги окружности, которые встречаются на полюсах.Есть 180 ° долгота по обе стороны от начального меридиана, который известен Prime Меридиан . Главный меридиан имеет обозначенный значение 0 °. Измерения долготы также определяется как запад или восток от нулевого меридиана. |
Latitude меры расположение мест на поверхности Земли с севера на юг относительно точки, находящейся в центре Земли ( рис. 2б-2 ).Эта центральная точка также находится на земном шаре. ротационный или полярный ось . Экватор - это отправная точка для измерения широты. Экватор имеет значение ноль градусов. Линия широты или параллели 30 ° северной широты имеет угол 30 ° северной широты. представлен экватором ( Рисунок 2b-3 ). Максимум значение, которое может достигать широта, составляет 90 ° северной широты или Юг.Эти линии широты проходят параллельно вращающемуся ось Земли.
Долгота меры положение мест на поверхности Земли с запада на восток относительно дуги окружности, называемой Prime Меридиан ( Рисунок 2b-2 ). Положение Премьер-меридиан определен международным соглашением совпадать с местонахождением бывшего астрономического обсерватория в Гринвиче, Англия.Потому что окружность Земли похожа на круг, было решено измерить долготу в градусах. Число градусов в круге - 360. Главный меридиан имеет значение ноль градусов. Линия долгота или меридиан от 45 ° з.д. имеет угол, составляющий 45 ° к западу от плоскости. представлен нулевым меридианом ( Рис. 2b-3 ). В максимальное значение, которое меридиан долгота может быть 180 °, что составляет половину пути по кругу.Этот меридиан называется International. Линия дат . Используются обозначения запада и востока. чтобы различить, где находится местоположение относительно Нулевой меридиан. Например, все локации на севере Америка имеет западную долготу.
Универсальный Поперечный Mercator Система (UTM)
Другой часто используемый метод описания местоположения на Земле находится Универсал Поперечная сетка Меркатора ( UTM ) система .Это прямоугольная координата система является метрической, включая счетчик в качестве основная единица измерения. UTM также использует систему поперечной проекции Меркатора для моделирования Сферическая поверхность Земли на двумерной плоскости. Система UTM делит земную поверхность на 60-6 градусов долготы широкие зоны, идущие с севера на юг ( Рисунок 2b-5 ).Эти зоны начинаются на международной линии перемены дат и последовательно сменяются пронумерованы в восточном направлении ( рис. 2b-5 ). Каждый зона простирается от 84 ° северной широты до 80 ° южной широты (рис.). 2б-4 ). В центре каждой из этих зон находится центральный меридиан. Местоположение измеряется в этих зонах от ложных origin , который определяется относительно пересечения экватора и центрального меридиана для каждой зоны.За местоположения в Северном полушарии, ложное происхождение 500000 метров к западу от центрального меридиана на экваторе. Координатные измерения местоположения в Северном полушарии с использованием системы UTM сделаны относительно этой точки в метрах в меридиана (продольных расстояние) и северной широты (широта расстояние).Точка, определяемая пересечением 50 ° северной широты и 9 ° з.д. будет иметь координату UTM зоны 29 , 500000 метров восток (E), 5538630 метров к северу (N) (см. Рисунки 2b-4 и 2b-5 ). В Южном полушарии начало координат составляет 10 000 000 метров. юг и 500000 метров к западу от экватора и центра меридиан соответственно. Местоположение найдено на 50 ° южной широты и 9 ° з.д. будет иметь координату UTM зоны 29 , 500000 метров E, 4461369 метров N (помните, что север в южной Полушарие измеряется от 10 000 000 метров к югу от экватор - см. Рисунки 2b-4 и 2b-5 ).
| Рисунок 2b-4: The на следующем рисунке описаны характеристики зоны UTM " 29 " найдено от 12 до 6 ° западной долготы. Обратите внимание, что зона разделена на две половины. Половина на осталось представляет собой область в Северном полушарии.Южное полушарие расположено справа. В синяя линия представляет центральный меридиан для этого зона. Измерения локаций для этой зоны рассчитываются родственник к ложному происхождению. В Северном полушарии это происхождение расположено в 500 000 м к западу от экватора. Южный Hemisphere UTM измерения определяются относительно происхождения, расположенного в 10 000 000 метров к югу и 500000 метров к западу от экватора и центральный меридиан соответственно. |
Изменена система UTM. чтобы сделать измерения менее запутанными. В этой модификации шесть градусов шириной зоны делятся на более мелкие части или четырехугольники, которые восемь градусов широты. Каждая из этих строк обозначены, начиная с 80 ° южной широты, буквами от C до X последовательно с опущенными I и O ( Рисунок 2b-5 ).Последняя строка X отличается от других строк и продолжается от 72–84 ° северной широты (двенадцать градусов в высоту). Каждый четырехугольников или зон сетки идентифицируются по их цифровое / буквенное обозначение. Всего 1200 четырехугольников определены в системе UTM .
Четырехугольная система позволяет нам для дальнейшего определения местоположения с помощью системы UTM .Для местоположения 50 ° северной широты и 9 ° западной долготы координата UTM теперь может быть выражено как Grid Zone 29U , 500000 метров E, 5538630 метров N.
| Рисунок 2b-5: Система UTM также использует систему сеток, чтобы разбить Землю на 1200 четырехугольников.Чтобы иллюстрация была удобной, большинство этих зон были исключены. Обозначение из каждый четырехугольник дополнен цифрой-буквой система. Вдоль горизонтального дна шесть градусов Зоны шириной по долготе нумеруются, начиная с 180 ° западной долготы, от 1 до 60. Двадцати вертикальным рядам присвоены буквы От C до X за исключением I и O.Буква C начинается с 80 ° южной широты. Обратите внимание, что ряды 8 градусов широты, за исключением последней строки X, которая 12 градусов шириной. Согласно справочной системе, в ярко-зеленом четырехугольнике обозначена сетка 29V (примечание что в этой системе координата запад-восток задается первой, с координатами юг-север).Эта сетка зона находится между 56 и 64 ° северной широты и 6 °. и 12 ° западной долготы. |
Каждый четырехугольник UTM далее подразделяется на число 100 000 на 100 000 метровые зоны. Эти подразделения кодируются системой комбинации букв, в которых одна и та же комбинация из двух букв не повторяется в пределах 18 градусов широты и долготы.В пределах каждого из 100 000 квадратных метров можно указать местоположение с точностью до одного метра с использованием 5-значного восточного направления и система отсчета северов.
Сетка UTM система отображается на всех United Государственная геологическая служба ( USGS ) и Национальная топографическая серия ( NTS ) из Карты Канады.На Карты четырехугольника USGS на 7,5 минут (масштаб 1: 24 000), 15 минут карты четырехугольника (1: 50 000, 1: 62 500 и стандартное издание) Масштаб 1: 63 360), а канадский масштаб 1: 50 000 отображает сетку UTM . линии нарисованы с интервалом в 1000 метров и показаны либо с синей галочкой на краю карты, либо полной синие линии сетки. На картах USGS 1: 100 000 и 1: 250 000 масштаб и канадский масштаб 1: 250 000 отображает полную сетку UTM отображается с интервалом в 10 000 метров. Рисунок 2b-6 описывает как сеточная система UTM может использоваться для определения местоположения на 1: 50,000 National Топографическая серия карты Канады .
| Рисунок 2b-6: The в верхнем левом углу: " Tofino " 1: 50,000 National Показана карта топографической серии Канады . над.Синие линии и соответствующие числа на карте маржа используются для определения местоположения посредством сетки UTM система. Сокращенно UTM 1000 метров значения или основных цифр являются показаны числами на полях карты, которые меняются от 0 до 100 (100 фактически принимает значение 00). В каждом из углы карты, две основные цифры выражается в их полной координате UTM форма.На изображении мы видим 283000 м в.д. и 5458000 м. м N. красная точка - это находится в центре сетки, определенной по принципу числа от 85 до 86 на восток и от 57 до 58 на север. Более того полная сетка UTM ориентир для этого местоположения будет 285500 м в.д. и 5457500 м N. Информация также находится на полях карты сообщает нам (не показано), что отображаемая область находится в сетке Зона 10U и 100000 кв.м. BK и CK сотки. расположен на этой карте. |
Расстояние на картах
В разделе 2а , мы узнали, что изображение Земли в трехмерном поверхность на двухмерной карте создает ряд искажений которые включают расстояние, площадь и направление. Это возможно для создания карт, находящихся на некотором расстоянии друг от друга.Однако даже у этих типов карт есть некоторая форма искажения расстояния. Карты равноудаленности могут управлять искажением только по линии широты или линии долготы . Расстояние часто правильно на равноудаленных картах только в направление широты.
На карте большого масштаба 1: 125 000 или больше, искажение расстояния обычно незначительно.Примером крупномасштабной карты является стандартная топографическая карта. карта. На этих картах легко измерить расстояние по прямой. Расстояние сначала измеряется на карте с помощью линейки. Этот затем измерение преобразуется в реальное расстояние используя масштаб карты. Например, если мы измерили расстояние 10 сантиметров на карте масштаба 1:10 000, мы бы умножили 10 (расстояние) на 10 000 (масштаб).Таким образом, реальное расстояние в реальном мире будет 100 000 сантиметров.
Измерение расстояния по объектам карты, которые не прям немного сложнее. Одна техника который может быть использован для этой задачи, состоит в использовании ряда прямолинейные отрезки. Точность этого метода зависит от от количества использованных отрезков прямой ( Рисунок 2b-7 ).Другой метод измерения расстояний по криволинейным картам - использовать механическое устройство, называемое опизометром . В этом устройстве используется небольшое вращающееся колесо, которое записывает пройденный путь. Записанное расстояние измеряется этим устройство в сантиметрах или дюймах.
| Рисунок 2b-7 : Измерение расстояния на карте с использованием отрезков прямых линий. |
Направление на картах
Как и расстояние, направление трудно измерить на картах из-за искажения, вызванного проецированием системы. Однако на картах это искажение довольно мало. с масштабом более 1: 125 000. Направление обычно измеряется относительно местоположения Север или Юг Полюс .Маршруты определены из этих мест считаются относительными к True Север или Правда Юг . Магнитные полюса также можно использовать для измерения направление. Однако эти точки на Земле расположены в пространственно разных точках от географического севера и Южный полюс. Север Магнитный полюс расположен на 78,3 ° северной широты, 104.0 ° запад. возле острова Эллеф Рингнес, Канада. В Южном полушарии, Юг Магнитный полюс находится в День Содружества в Антарктиде. и имеет географическое положение 65 ° южной широты и 139 ° восточной долготы. Магнитные полюса также не фиксируются сверхурочно и смещаются. их пространственное положение в сверхурочное время.
Топографические карты обычно имеют склонение На них нарисована диаграмма ( Рисунок 2b-8 ).В Северном полушарии карты, диаграммы склонений описывают угловую разницу между Магнитным Севером и Истинным Севером. На карте угол Истинного Севера параллельна изображенным линиям долготы. Диаграммы склонения также показывают направление сетки . Северный . Север по сетке - это угол, параллельный восток линии найден на Универсал Поперечная сетка Меркатора ( UTM ) система ( Рисунок 2b-8 ).
| Рисунок 2b-8: Это диаграмма склонения описывает угловую разницу между сеткой, истинным и магнитным севером. Эта иллюстрация также показывает, как углы измеряются относительной сеткой, true, и магнитный азимут. |
В поле направление признаков часто определяется магнитным компасом, который измеряет углы относительно Магнитного Севера.Использование диаграммы склонения найденные на карте, люди могут преобразовать свои полевые измерения магнитного направления в направлениях относительно либо сетка, либо истинный север. Компасные направления могут быть описаны с помощью азимутальной системы или подшипник система . Система азимута рассчитывает направление в градусах полного круг.Полный круг имеет 360 градусов ( рис. 2b-9 ). В азимутальной системе север имеет направление либо 0 или 360 °. Восток и запад имеют азимут 90 ° и 270 ° соответственно. На юг имеет азимут 180 °.
| Рисунок 2b-9: Азимутальная система направление измерения основано на найденных 360 градусах по полному кругу.На рисунке показаны соответствующие углы. с основными сторонами света компаса. Обратите внимание, что углы определяются по часовой стрелке с севера. |
Система подшипников делит направление на четыре квадранты 90 градусов. В этой системе север и юг являются доминирующими направлениями. Измерения определены в градусах от одного из этих направлений.Измерение двух углов, основанных на этой системе, описаны на рисунке . 2б-10 .
| Рисунок 2b-10: Подшипник , система использует четыре квадранта по 90 градусов для измерения направления. На рисунке показаны измерения в двух направлениях. Эти измерения производятся относительно севера или юга.Север и юг имеют размер 0 градусов. Восток и запад имеют значение 90 градусов. Первое измерение ( зеленый ) найдено в северо-восточном квадранте. В результате его измерение находится на север, 75 градусов к востоку или 75 ° восточной долготы. Первое измерение ( оранжевый ) находится в юго-западном квадранте.Его измерение находится на юге 15 градусов к западу или S15 ° з.д. |
Системы глобального позиционирования
Определение местоположения в полевых условиях когда-то была трудной задачей. В большинстве случаев требовалось использование топографической карты и особенностей ландшафта для оценки место расположения. Однако сейчас технологии сделали эту задачу очень просто. Глобальный Системы позиционирования ( GPS ) может рассчитать свое местоположение с точностью до 30 метров ( Рисунок 2b-11 ). Эти системы состоят из двух частей: приемник GPS и сеть из многих спутников. Радиопередачи со спутников транслируются постоянно. GPS приемник принимает эти передачи и посредством триангуляции вычисляет высоту и пространственное положение приемной Блок.Для триангуляции требуется минимум три спутника.
| Рисунок 2b-11: Портативный Глобальный Системы позиционирования ( GPS ). Приемники GPS могут определять широту, долготу, и высота в любом месте на поверхности Земли или над ней от сигналов, передаваемых несколькими спутниками.Эти единицы также могут использоваться для определения направления, пройденное расстояние и определение маршрутов путешествия в полевых условиях. |
math - Как рука системы координат связана с направлением вращения и порядком вершин?
Переполнение стека- Около
- Товары
- Для команд
- Переполнение стека Общественные вопросы и ответы
- Переполнение стека для команд Где разработчики и технологи делятся частными знаниями с коллегами
- Вакансии Программирование и связанные с ним технические возможности карьерного роста
- Талант Нанимайте технических специалистов и создавайте свой бренд работодателя
- Реклама Свяжитесь с разработчиками и технологами по всему миру
- О компании
Анализ методов определения местоположения с использованием измерений фазы несущей GPS
Если три или более GPS-антенны правильно установлены на платформе и различия измерений сигналов GPS собираются одновременно, можно определить векторы базовых линий между антеннами и определить ориентацию платформы. векторы можно вычислить. Таким образом, предварительным условием для метода определения ориентации на основе GPS является вычисление базовых линий между антеннами с точностью до миллиметра.Для получения точных решений по пространственному положению в качестве основного типа измерений используются двойные разности фаз несущей. Использование измерений фазы несущей приводит к проблеме точного определения неоднозначного целого числа циклов в начальной фазе несущей (целочисленная неоднозначность). В этой работе были реализованы два алгоритма (LSAST и LAMBDA), которые были протестированы на разрешение неоднозначности, что позволило точно определять ориентацию в реальном времени с использованием измерений, полученных от приемников GPS в связанной форме.Ориентация платформы была получена с использованием формулировки кватернионов, и результаты показали, что производительность метода LSAST аналогична LAMBDA в том, что касается количества эпох, необходимых для устранения неоднозначности, но время обработки значительно выше. Точность конечного результата была одинаковой для обоих методов, лучше, чем от 0,1 ° до 0,2 °, когда базовые линии рассматриваются в несвязанной форме.
1. Введение
Глобальные навигационные спутниковые системы (GNSS) - это спутниковые радионавигационные системы, обеспечивающие пользователям во всем мире точное местоположение и синхронизацию.Системные спутники передают радиочастотные сигналы, содержащие информацию, необходимую пользовательскому оборудованию для вычисления своего навигационного решения (положение, скорость и время). GNSS также может использоваться для определения ориентации платформы, для которой необходимы три или более антенн для расчета параметров ориентации [1].
Если три или более антенн GNSS правильно установлены на платформе и разности измерений сигналов GNSS собираются одновременно, можно определить векторы базовых линий, сформированные между антеннами, и можно рассчитать ориентацию платформы, определяемую этими векторами.Таким образом, предварительным условием для метода определения ориентации на основе систем GNSS является вычисление базовых линий между антеннами.
Точные решения относительно положения могут быть получены с использованием наблюдаемых двойной разности фаз несущей в качестве основного типа измерений, включая все независимые комбинации положений антенн. Базовые линии между антеннами должны определяться с точностью до миллиметра. Обычно расстояние между антеннами составляет несколько метров или меньше, и все пространственно коррелированные ошибки между антеннами почти устраняются в процессе дифференцирования (одиночного и двойного), включая орбитальные, ионосферные и тропосферные ошибки.Следовательно, основными источниками ошибок, влияющими на определение ориентации, являются многолучевое распространение, внутренний шум приемника и изменение фазового центра антенны [2].
Использование измерений фазы несущей приводит к проблеме точного определения неоднозначного целого числа циклов начальной фазы несущей (целочисленная неоднозначность). Чтобы повысить уверенность и ускорить процесс за счет ограничения пространства поиска, можно установить три типа ограничений на основе предварительных сведений о фиксированной геометрии антенны: (i) длина базовой линии, (ii) угол между базовыми линиями и (iii) знание геометрия антенн как сети, в которой неоднозначности двойной разности должны удовлетворять условию замкнутого контура [2].В последнее время несколько исследований были сосредоточены на увеличении успешности разрешения неоднозначности процесса с использованием ограничений, как в [3, 4]. Ссылки [5, 6] показывают использование фазовых измерений и эффективность решения методов целочисленной неоднозначности в приложениях позиционирования. [7] Справочник разрабатывает процедуру для определения положения спутника по трем осям с помощью GPS, связанного с гироскопом, и устранения неоднозначностей с помощью метода, описанного в [8]. Таким образом, процесс устранения неоднозначности является важным шагом для определения точного вектора базовой линии, что приводит к точному определению ориентации.
Обычное представление положения выполняется с помощью углов Эйлера. Эта параметризация в целом требует сложных вычислений из-за использования тригонометрических функций и появления сингулярности при моделировании движения. Другой способ параметризации отношения - использование кватернионов. Эта параметризация имеет некоторые преимущества перед углами Эйлера; он вычислительно эффективен, в нем нет сингулярностей и он не зависит от тригонометрических функций [9].
Итак, в этой работе будет протестирована реализация и анализ алгоритмов разрешения целочисленной неоднозначности, позволяющих точно определять ориентацию в реальном времени с использованием измерений, предоставляемых приемниками GPS.Тесты алгоритмов, использующие кватернионы для представления отношения, будут реализованы с реальными данными, собранными в INPE и описанными в [7]. В этом эксперименте три антенны были закреплены на конструкции с известной длиной базовой линии (1 м) и углом между базами 90 °. Тесты проводились с использованием методов LAMBDA и LSAST для разрешения неоднозначности.
Метод регулировки декорреляции неоднозначности методом наименьших квадратов (LAMBDA) - это процедура для оценки целочисленной неоднозначности при измерениях фазы несущей.Этот метод выполняет оценку целочисленной неоднозначности посредством Z-преобразования, в котором неоднозначности декоррелируются перед процессом поиска целочисленных значений. Затем проблема минимизации рассматривается как дискретный поиск внутри эллипсоидальной области, определяемой декоррелированными неоднозначностями, которая меньше исходных. В результате получаются целочисленные оценки неоднозначностей методом наименьших квадратов. Этот метод был введен в [10, 11]. Ссылки [12, 13] показывают аспекты вычислительной реализации и пространство поиска неоднозначности, снижающее производительность.Метод решения неоднозначности методом наименьших квадратов (LSAST), также известный как метод LSAST, был предложен в [14]. Этот метод включает модифицированный метод последовательных наименьших квадратов, в котором параметры неоднозначности делятся на две группы: первичные неоднозначности (обычно три неоднозначности с двойной разностью) и вторичные неоднозначности. Только основные неоднозначности полностью перебираются циклически вокруг соответствующей неоднозначности с плавающей запятой после округления до ближайшего целого числа. Для каждого набора первичных неоднозначностей существует уникальный набор вторичных неоднозначностей.Следовательно, размер поиска меньше, а время вычислений значительно короче, чем при подходе полного поиска. Выбор измерений первичной группы основан на значении GDOP. геометрическое снижение точности (GDOP) - это величина, которая измеряет влияние геометрии спутника на ошибки позиционирования. Спутники с низким GDOP приведут к поиску менее перспективных решений. Однако GDOP не может быть очень низким, чтобы избежать неопределенности положения, включая более одного решения для измерений вторичной группы.Процедура заключается в выборе основной группы спутников с разумным GDOP.
2. Представление отношения
Углы Эйлера - это средство представления пространственной ориентации любой системы координат как композиции вращений из системы координат. Эти углы однозначно определяют ориентацию твердого тела в трехмерном пространстве. Существует несколько соглашений для определения углов Эйлера в зависимости от выбора осей и порядка, в котором выполняются повороты вокруг этих осей.Матричное выражение можно найти для любого кадра с учетом его углов Эйлера, выполняя последовательно три поворота. Здесь углы Эйлера обозначаются как тангаж, крен и рыскание. Результирующая матрица вращения дается условно Расширяя матрицу вращения, Кватернион определяется как функция угла поворота и оси вращения и состоит из скалярного члена и векторного члена [15] с участием Матрица вращения задается в кватернионах как где - единичная матрица третьего порядка, а Или явно Углы Эйлера могут быть вычислены из матрицы вращения как
.Технические отчеты | НовАтель
Точное позиционирование
- Анализ производительности PPP-AR от NovAtel - февраль 2020 г.
В этом документе анализируются статические и кинематические результаты с использованием механизма PPP-AR с поправками TerraStar-NRT. - Анализ производительности в режиме почти реального времени - январь 2019
В этом документе сравниваются статические и кинематические характеристики PPP с использованием точных спутниковых часов и продуктов для измерения орбиты Waypoint в режиме, близком к реальному времени, по сравнению с услугами общей коррекции с задержкой. - Определение координат базовой станции с использованием точного точечного позиционирования
В этом документе демонстрируется статическая точная точка позиционирования (PPP) GrafNav как функция времени с использованием занятий в диапазоне от 30 минут до 24 часов. Результаты были получены из 36 000 прогонов обработки с использованием данных 1000 постоянно действующих базовых станций, работающих в США. Эти станции используют различное оборудование GNSS. Результаты показывают, что метод PPP можно использовать для проверки координат базовой станции или даже для определения координат - Тесно связанная обработка точного положения точки (PPP) и данных INS
На выставке ION GNSS 2009 компания NovAtel объявила о значительном усовершенствовании Inertial Explorer 8.30 - тесно связанный модуль GPS / INS, который требует данных GPS только от одного приемника (т.е. без базовой станции). Ранее сильно связанная обработка поддерживалась только при дифференциальной обработке. Тесно связанная обработка позволяет использовать данные GPS даже там, где отслеживаются только два спутника. Это может значительно снизить рост ошибок IMU, когда спутники пропадают из-за, например, крутых поворотов. Тесно связанная обработка имеет дополнительное преимущество, заключающееся в упрощении рабочего процесса, поскольку данные GPS и IMU обрабатываются за один шаг.В этой статье представлены результаты семи полетов с имитацией разворотов на 25, 45 и 70 градусов. - Воздушное многопроходное точное позиционирование в GrafNav 8.10
Новое в GrafNav 8.10 (выпуск которого запланирован на январь 2008 г.) - это улучшенный метод точного позиционирования (PPP), называемый многопроходным. Многопроходный PPP улучшает кинематические результаты PPP до 40% по сравнению с результатами исходного процессора PPP, представленного в GrafNav 7.80. В этом отчете представлены результаты пяти аэрофотосъемок, обработанных в GrafNav 7.80 и GrafNav 8.10. Для каждого полета решения PPP сравниваются с высококачественным дифференциальным решением. - Airborise Precise Point Positioning (PPP) в GrafNav 7.80 со сравнениями с решениями Канадской системы пространственной привязки (CSRS). Выпуск
GrafNav 7.80 запланирован на 15 марта 2007 года. Важной новой функцией, включенной в этот выпуск, является процессор точного позиционирования (PPP) . Три полета в воздухе обрабатываются процессором PPP GrafNav и также переданы в CSRS для обработки.Оба результата PPP сравниваются с дифференциальным истинным решением.
Инерционный проводник
- Результаты полетов по аэрофотограмметрии
-
В этом документе показано, как технология NovAtel GPS / INS, SPAN (синхронизированная навигация по положению), может быть интегрирована в приложение аэрофотограмметрии с помощью программного пакета Inertial Explorer®, обеспечивающего возможность постобработки - Тесно связанная обработка точного положения точки (PPP) и данных INS
На выставке ION GNSS 2009 компания NovAtel объявила о значительном усовершенствовании Inertial Explorer 8.30 - тесно связанный модуль GPS / INS, который требует данных GPS только от одного приемника (т.е. без базовой станции). Ранее сильно связанная обработка поддерживалась только при дифференциальной обработке. Тесно связанная обработка позволяет использовать данные GPS даже там, где отслеживаются только два спутника. Это может значительно снизить рост ошибок IMU, когда спутники пропадают из-за, например, крутых поворотов. Тесно связанная обработка имеет дополнительное преимущество, заключающееся в упрощении рабочего процесса, поскольку данные GPS и IMU обрабатываются за один шаг.В этой статье представлены результаты семи полетов с имитацией разворотов на 25, 45 и 70 градусов. Интеграция - GPS / INS в режиме реального времени и постобработка с системой SPAN
компании NovAtel В этом документе описывается архитектура системы SPAN GPS / INS. Описаны возможности системы в режиме реального времени и постобработке. Рабочие характеристики проверяются в двух разных средах: в воздухе и на суше.
GrafNav / Net
- GrafNav Мониторинг вулкана
Программа NovAtel Waypoint GrafNav обрабатывает данные из кратера Mt.Сент-Хеленс. - Кинематическая точность пакетной обработки одного набора данных при различных базовых расстояниях с использованием станций CORS в GrafNav версии 7.50 (PDF - 209 КБ)
В этом отчете показаны достижимые точности для одного набора данных при пакетной обработке с использованием данных базовой станции CORS. В каждом прогоне используются три станции CORS на средней базовой длине 130 км, 545 км и 1270 км. Результаты сравниваются с результатами обработки трех локально установленных базовых станций, у которых во время исследования средняя длина базовой линии составляла 14 км.Результаты пакетной обработки представлены как в старом стиле пакетной обработки Waypoint, так и в новом стиле, доступном в версии 7.50. Новый метод пакетной обработки использует все данные одновременно в одном фильтре Калмана. - Погрешности статической базовой линии в зависимости от длины базовой линии, времени наблюдения и эффекта от использования точных эфемерид (PDF - 112 КБ)
В этом отчете исследуются статические точности базовой линии для базовых длин 5, 20, 40, 60, 200, 300 , 400, 500, 700, 800, 900 и 1000 км.Каждая базовая линия обрабатывается с данными за 1, 3, 6, 12 и 24 часа как с широковещательными, так и с точными эфемеридами, чтобы установить:
- Когда точные эфемериды начинают иметь измеримое значение
- Какой уровень точности следует ожидать для данной длины базовой линии и времени захвата
- Сколько данных следует собрать, прежде чем улучшение конвергенции решения будет незначительным или отсутствующим.
- Кинематический мониторинг базовой линии различной длины (PDF - 2.61MB)
В этом исследовательском отчете рассматривается влияние и точность решений обработки данных GPS, которые являются кинематическими. Представлены статистические показатели алгоритма разрешения кинематической неоднозначности, а также точность, полученная в каждом тесте. - Отслеживание относительного движения четырех космических полезных нагрузок, запущенных с суборбитальной ракеты НАСА (PDF - 157KB)
В этом отчете описывается использование программного обеспечения подвижной базовой линии для отслеживания после миссии, относительные траектории 4-х GPS-приемников Ashtec G12 HDMA, прикрепленных к полезные нагрузки сброшены с ракеты Black Brant XII.
Обработка GNSS / IMU
Сканирующие датчики LiDAR стали стандартным компонентом большинства мобильных картографических систем и обеспечивают впечатляющий уровень детализации в 3-х измерениях. Чтобы предоставить реальные координаты облака точек LiDAR, система GNSS / IMU часто используется для внешнего ориентирования1 (EO), а постобработка обычно обеспечивает оптимальные оценки EO. Для создания окончательного облака точек параметры навигационного объекта EO можно использовать напрямую или в качестве начального приближения для последующей обработки LiDAR, такой как SLAM.Поэтому повышение точности значений EO, производимых системой GNSS / IMU, очень желательно.
.ECOS Определение: Электронная система определения координат
Что означает ЭКОС? ECOS означает электронную систему определения координат. Если вы посещаете нашу неанглийскую версию и хотите увидеть английскую версию Электронной системы определения координат, прокрутите вниз, и вы увидите значение Электронной системы определения координат на английском языке. Имейте в виду, что сокращение ECOS широко используется в таких отраслях, как банковское дело, вычислительная техника, образование, финансы, правительство и здравоохранение.В дополнение к ECOS, Electronic Coordinate Determination System может быть сокращением от других сокращений.
ECOS = Электронная система определения координат
Ищете общее определение ECOS? ECOS означает электронную систему определения координат. Мы с гордостью вносим аббревиатуру ECOS в самую большую базу данных сокращений и акронимов. На следующем изображении показано одно из определений ECOS на английском языке: Электронная система определения координат. Вы можете скачать файл изображения для печати или отправить его своим друзьям по электронной почте, Facebook, Twitter или TikTok.
Значения ECOS в английском
Как упоминалось выше, ECOS используется как аббревиатура в текстовых сообщениях для обозначения электронной системы определения координат. Эта страница посвящена аббревиатуре ECOS и ее значению как Электронная система определения координат. Обратите внимание, что электронная система определения координат - не единственное значение ECOS. Может быть несколько определений ECOS, поэтому просмотрите их в нашем словаре, чтобы узнать все значения ECOS один за другим.